Vestavěné systémy
Vestavěný systém je kombinace hardwaru a softwaru, jejímž smyslem je řídit externí proces, zařízení nebo systém. Jedná se o počítač zabudováný do systému, ale pro uživatele není jako počítač viditelný – uživatel by neměl tušit, že pracuje s počítačem. Hlavní interakce však nemusí být s člověkem (čidla pro snímání větrného prostředí, apod.) Často jsou navrženy tak, aby fungovaly i bez zásahu člověka.
Obvykle mají jeden program pro celý život.
Mikroprocesory (μP)
Základní procesorová jednotka na čipu. Jsou vhodné pro zpracování informací a dat.

Mikropočítače (μC)
μP s příslušnými podpůrnými obvody (periferní I/O a paměť). Při malém počtu I/O obvodů se nazývá mikrokontrolér. Jsou vhodné k řízení vnějších zařízení.

Dělení podle typů architektur:
1) CISC
- velké množství instrukcí
- jednoduše se programuje
- dnes už ztrácí na významu
2) RISC
- jednodušší instrukční soubor – 2 základní instrukce pro paměťové operandy
LOADaSTORE - větší výpočetní výkon za nižší cenu
1) Harvardská architektura
-
oddělený paměťový prostor pro program a pro data – program je konstantní (ROM, nevolatilní) a mění se jen data (RAM, volatilní)
-
u klasických PC vymizela, používá se pouze u μP
2) Von Neumannova architektura
- program i data ve stejném adresovém prostoru – přívětivé pro programátora. Nemusí uvažovat, na co použít ROM nebo RAM.
Periférie
- Čítač – speciální registr, který zvyšuje svoji hodnotu při každé periodě hodinového signálu
- Časovač – čítač, jehož čas je zvyšován hodinovým signálem
- Jednotka záchytu hrany - k určování času událostí
- Generátor hodin – k synchronizaci bloků vestavěného systému
- Watchdog – prostředek zvyšující odolnost proti poruchám systému; pokud dojde k přetečení jeho čítače, systém se restartuje
- RTC modul – uchovává aktuální reálný čas
- Klávesnice
Sériové rozhraní
Bity jsou přenášeny po jediném vodiči jeden za druhým. Z toho důvodu je potřeba jednoznačně určit, ve kterém okamžiku je na datovém vodiči hodnota kterého bitu.
Existují 2 základní principy:
1) Synchronní sériový přenos – spolu s daty se přenáší také hodinový signál (v celé soustavě jen jeden zdroj signálu), určující, kdy se objeví další bit na datovém vodiči nebo kdy je možné bezpečně sejmout hodnotu z datového vodiče.
2) Asynchronní sériový přenos – Hodinový signál se nepřenáší, ale přijímač si ho generuje sám. Je potřeba zajistit, aby přijímač a vysílač běželi na stejné frekvenci a měli stejnou fázi. Synchronizace se vykoná předem dohodnutou změnou úrovně na datovém vodiči.
-
Princip: Vodič je v klidovém stavu, přenos je zahájen změnou klidového stavu, předem dané délky tzv. start bit), poté jsou posílána samotná data. Na konci přeneseného slova následuje volitelný paritní součet a ukončení přenosu (stop bit). Celému přenosu říkáme rámec (frame).

SCI (Serial Communication Interface)
Asynchronní sériové rozhraní. Systém tvoří generátor hodinového signálu, modul vysílače, modul přijímače a podpůrné obvody.
Výstup vysílače je na vodiči označený jako TxD (transmit data) a vstup jako RxD (receive data). Hodinový signál je společný pro přijímač a vysílač.
Pro programátora jsou podstatné registry SCI: datové, konfigurační a stavové.
SPI (Serial Peripheral Interface)
Synchronní sériové rozhraní. Původně určené k připojování a komunikací s periferními zařízeními. Rozhraní je fullduplex (probíhá zároveň přenost oběma směry).
2 režimy zařízení připojených přes SPI:
1) master – generuje synchronizační hodinový signál, inicializuje a řídí komunikaci
2) slave – obvykle periferie, se kterými master komunikuje

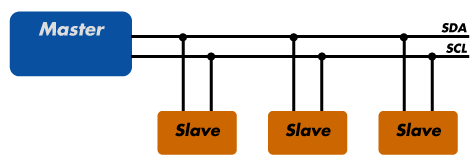
IIC (IC)
Synchronní sériové rozhraní. Hlavním cílem je jednoduchá a levná implementace. Protokol typu master/slave komunikující halfduplex. Ke sběrnici IIC je možné připojit až 127 zařízení slave.
Tvoří ho jeden datový vodič (SDA) a jeden vodič pro přenos synchronizačního signálu (SCL).
Analogově-číslicový převodník
Převádí analogový vstup na číslicový výstup. Analogový vstup představují signály ze spojitých snímačů (teplota, tlak, osvětlení,…).

Typicky má 3 části:
1) dolnopropustní filtr
2) track/hold – obvod uchovávající hodnotu sledované veličiny během převodu signálu
3) AD převodník
Podle Shanonova vzorkovacího teorému musí být kmitočet AD převodníku alespoň 2× větši než největší kmitočet ve vzorkovaném analogovém signálu. Jinak může dojít k aliasingu (nenávratné zkreslení signálu).
